Previous Page | Next Page
[ADP開発日誌-公開1周年記念特集 Part6] プログラミング言語の制御構造のいろいろ(4)
ちょっと余計な記事が入りましたが、続きをC++の仮想関数の欠点
話が少し前後しますが、Part4の記事でC++の仮想関数呼び出しの仕組みについて説明しましが、ここではC++の仮想関数の欠点について指摘します。C++ではvtableというメンバ関数のアドレスを集めたテーブルを用いて仮想関数の呼び出しを実現していました。この方式は効率がよいのですが『コンパイル時に呼び出すべき仮想関数が決定しなければならない』という弱点があります。どういうことかといいますとC++でのメンバ関数呼び出し
object.virtual_method( arg1, arg2, arg3)
という呼び出しで、virtual_methodというメンバ関数名はコンパイル時に参照されますが、実行時には内部的に振られた番号(vtableのインデックス)になります。つまり実行時にはこの名前は参照できません。と同時にvtableのインデックスを取得する手段もないので、実行時に呼び出すメンバ関数を選択したいということができません。
これの何が欠点かピンとこないかもしれませんが、例えば、バッチファイルからVBScriptを使ってExcelを操ったりしますが、この特にExcelのバージョンをあまり気にせずにExcelを操作(メソッドを呼び出す)するでしょう。これと同じことは、C++の仮想関数の仕組みではストレートに実装できないということです。Windowsでは皆さんご存知のとおり、COMという仕組みをOSに実装することで実行時に呼び出すメソッドを特定することを行っています。
COMというとえらく古いと思われるかもしれませんが、.NET Framkework からExcelを呼び出す場合もCOM相互運用性という仕組みを使って.NET Framework → COM → Excel という風に呼び出しいます。
話が脱線しますが、私は.NET Frameworkが廃れるのではないか? と思っていますが、その理由のひとつが .NET FrameworkがCOMやOLE DB等のようにWindows APIを充分に置き換えていないと思えるところにあります(もっとも先のことは解りませんのでなんともいえませんが)。
関数の動的なロード&実行の例
場合によって呼び出す関数を変えるというプログラミングテクニックは、オブジェクト指向プログラミング以外にもあります。典型的な例のひとつにデバイスドライバがあります。
デバイスドライバはご存知のとおりハードウェアとOSのAPIを橋渡しするソフトウェアでハードウェアに合わせて作成されています。ハードウェアを変えるとそれにあわせてデバイスドライバも変えます。
デバイスドライバはCで記述されることが多いです。最近のOSではPlag&Playが一般的になりましたし、USB接続機器ではOSを再起動せずに、デバイスドライバがロードされます。このような動的なソフトウェアのロードの仕組みはどうなっているのでしょうか?
続いては、公開1周年記念特集記事として『プログラミング言語の制御構造のいろいろ(5)』を書いてみます。
2011-08-14 | コメント:0件
[ADP開発日誌-公開1周年記念特集 Part5] プログラミング言語の制御構造のいろいろ(3)
Part3の記事が短く、Part4(前回の記事)が長かったりバランスが悪いですが、まぁBlogということでご容赦を。メンバ関数呼び出し(thiscall)の補足
前回の記事にありましたメンバ関数の呼び出し規約(thiscall)について少し補足しますと、この呼び出し方法は一部のコンパイルで採用されているもので全てのコンパイラに当てはまりません。ちなみにVisual Studio 2008のC++コンパイラも違うやり方を採用しており、thisポインタをスタックに積むのではなくECXレジスタに代入します。thisポインタをECXに保存するとメンバ変数にアクセスする際に高速に処理が行えるのでこの方が効率的かと思います。思い出話をしますと、Visual Stduioの昔のバージョンでは、thisポインタはスタックに積まれていたと記憶しています。ADPの高速化に際してアセンブラコードを読んでいて『なんか変だな・・・』という感じで調べるとVisual Stduio 2008ではこのようになっていると気づきました。
仮想関数とif文
前回の記事に「仮想関数の説明はしない」と書きましたが、よくよく考えると仮想関数の仕組み(というか利用方法)を書かないと言いたいことが言えないことに気づきましたので書きます。仮想関数の有効性を示す例を示します。
以下、C/C++の擬似コードになります。if文を用いてデータタイプを判定しデータタイプに応じた変換を行い、valueの内容を文字列に変換しています。
char buf[512];
if ( value_type == int ) {
sprintf( buf, "%d", value);
} else if ( value_type == double ) {
sprintf( buf, "%f", value);
} else if ( value_type == char* ) {
strcpy( buf, value);
}
ここで、個別の変換処理(sprintfやらstrcpy)を仮想関数に置き換えます。
virtual int::to_string(char *buf) {
sprintf( buf, "%d", value);
}
virtual double::to_string(char *buf) {
sprintf( buf, "%f", value);
}
virtual char*::to_string(char *buf) {
strcpy( buf, value);
}
呼び出し部分のコードは、以下のとおりになります。
char buf[512]; value.to_string(buf);
仮想関数とはデータのタイプに合わせて実際のメンバ関数が呼び出される言語の機能になります。ここで、to_stringが仮想関数になり、実際に呼び出されるメンバ関数は、valueのデータタイプ(intやらchar*)に合わせて呼び出されることになります。ちなみにC++ではintやdoubleはクラスではないのでこのような仮想関数を作成することは出来ませんのであくまでも例になります。
仮想関数ですが、一見ややこしいですが、『データタイプに合わせて処理を行う』ような場合にはほぼ問題なく仮想関数に変換できるかと思います。ADPはC++で作成していますが、多くの場面で仮想関数を使っています。
例ではかなり端折っているので便利さが伝わりにくいですが、仮想関数を用いるとswitch文が減る(switch文もif文の一種と考えられる)といわれているとおり、今までif文が連なっていたコードが
value.to_string
とすっきりと記述出来るようになっています。重要な点はif文で書かれたコードブロックが to_string に置き換わり抽象度が上っていることです。抽象度が上がることが必ずしも可読性が増すわけではないですが、仮想関数を用いると呼び出し側のコードがすっきりとすることは分かるかと思います。
本記事のテーマである制御構造のいろいろという観点でみますと、仮想関数とはif文と関数呼び出しが混ざったものとも理解できます。
ちなみに、オブジェクト指向というとどうしても大きな括り(動物クラスとか社員クラスとか)の話になりますが、int型とかdouble型のような基本的な型でも行うことが出来、結構便利だったりします。C++では、intやdoube型ではメンバ関数を作ることが出来ませんが、Rubyのように使える言語もありますので試す価値はあります。またADPも同様なコードを記述することができます。
ADPのユニフィケーション(パターンマッチング)
前節で、仮想関数はif文と関数が混ざったものと説明しましたが、ADPでは関数呼び出し(述語の評価)に際しては、まずユニフィケーションが行われます。これは仮想関数を一般化しより強力かつ柔軟に呼び出すべき関数を選定できると考えることも出来ます。ユニフィケーションについては、こちらを参照下さい。
続いては、公開1周年記念特集記事として『プログラミング言語の制御構造のいろいろ(4)』を書いてみます。
2011-08-08 | コメント:0件
[ADP開発日誌-公開1周年記念特集 Part4] プログラミング言語の制御構造のいろいろ(2)
前回からちょっと間が空いてしまいましたが、ADPの1周年記念記事のPart4です。関数呼び出しのスタックの使われ方
前回の記事の終わりにスタックという言葉が出てきましたが、スタックとはプロセス(正確にはスレッド)毎に用意されているメモリエリアで、関数呼び出しやローカル変数の保持に使われます。
以下のC言語での関数呼び出し時のスタックの使われ方の例を図1に示します。
func( arg1, arg2, arg3); /* ------- ※1 */
図1
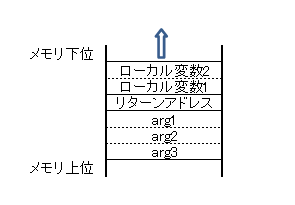
スタックは伝統的にアドレスの上位(数字が大きい)から下位に向かって領域が確保されます。
※1の関数が呼び出されるとき、先ず引数がスタックに積まれ、次いでリターンアドレス、そしてローカル変数の領域が確保されます。関数というのはどこから呼び出されても元の場所に戻ることが出来ますが、それが実現できるのは、呼び出し後に実行すべき命令のアドレス(リターンアドレス)をスタックに保持しているからです。
また、同時にどこから呼び出されてもローカル変数が『関数内で一時的に有効な変数』として機能できるのもスタックに変数のエリアを確保しているからになります。
ちなみに、数年前に流行したセキュリティリスクでバッファオーバーランというものがありますが、これはローカル変数の領域を溢れさせアドレスの上位にある戻りアドレスを書き換えてウイルスのプログラムを実行しようというC言語の関数呼び出しの仕組みを悪用したものになります。現在ではCPUレベルでの対策(NXビットとかXDビットとか呼ばれものでデータ領域の実行の禁止)が行われ、バッファオーバーランの脆弱性が起こりにくくなっています。
スタックには引数が積まれていますが、引数が積まれる順番には2通りのやり方があります。図1ではリターンアドレスに次いで arg1,arg2,arg3 と積まれていますが、反対に arg3,arg2,arg1 というやり方もあります。arg3,arg2,arg1の順番ですが、一見すると反対に見えますが、スタックに積む順番はarg1,arg2,arg3となります。ややこしいですが、※1の擬似アセンブラコードを示すと意味が良く分かるかと思います。
※2 ※1の擬似アセンブラコード(cdecl呼び出し) PUSH arg3 PUSH arg2 PUSH arg1 CALL func
PUSH命令の発行順とスタック上のリターンアドレスから見た順番が反対になります。
関数の呼び出し方法(つまりどのように機械語に翻訳するか)を呼び出し規約(主にx86のCPUで用いられている表現)といい、※2のような呼び出し方法をcdeclと呼びます。呼び出し規約はその他にPASCAL(文字通りPASCALで採用されている)とかstdcall(Windows-APIで採用)とかthiscall(C++のメンバ関数呼び出し)等があります。
メンバ関数の呼び出しでのスタックの使われ方
続いて、C++のメンバ関数呼び出しでのスタックの使われ方について説明します。
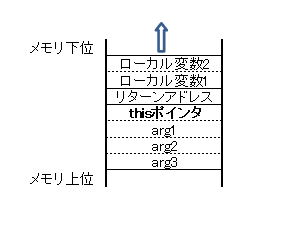
以下のC++でのメンバ関数の呼び出し時のスタックの使われ方の例を図2に示します。
object.method( arg1, arg2, arg3); // ------- ※3
図2
※3の擬似アセンブラコードを以下に示します。
※4 ※3の擬似アセンブラコード(thiscall呼び出し) PUSH arg3 PUSH arg2 PUSH arg1 PUSH object CALL method
違いは、object(正確にはobjectのアドレス)がthisポインタとして引数の一つとしてスタックに積まれていることです。その他の違いはありません。こうしてみるとオブジェクト指向というのは単純に
method( &object, arg1, arg2, arg3)
というコードを、
object.method( arg1, arg2, arg3)
という風に記述できる構文上の違いであるに過ぎないということに気づくかと思います。
ADPでは、この考え方を推し進めて、メソッド形式(メンバ関数呼び出しとほぼ同じ意味)として通常の述語形式での呼び出しとメソッドの呼び出しを混ぜて使うことができるようにしています。
ちなみに、私も含めて、多くのC言語の上級エンジニアがこのような見方をしてC言語からC++(オブジェクト指向)に移行していたかと思います。
もっとも、この話は、『仮想関数はどのように機械語に翻訳されるのか?』の話をしなければ終わりになりません。
次いで、仮想関数の呼び出しの話をします。
仮想関数の呼び出しでのスタックの使われ方
前節で説明したメンバ関数の呼び出しは従来の関数呼び出しの延長線上のものですが、ここでは、仮想関数と呼ばれるオブジェクト指向独特の呼び出し方法について説明します。以下の仮想関数の呼び出しについて考えます。ちなみにスタックの構成は図2で仮想関数・通常のメンバ関数(非仮想関数)での違いはありません。
object.virtual_method( arg1, arg2, arg3); // ------- ※5※5の擬似C++コードを以下に示します。
※6 ※5の擬似アセンブラコード(thiscall呼び出し) PUSH arg3 PUSH arg2 PUSH arg1 PUSH object MOV EAX, [object + vptr] ; ------------------- A MOV EDX, [EAX + virtual_method_offset] ; ----- B CALL EDX ; ------------------------------------ C
object + vptrなどや、EAX + virtual_method_number の部分がかなり曖昧ですが、エッセンスとして読んでいただければと思います。
※6のアセンブラコードではよく分からないかと思いますので、まずはオブジェクトのメモリレイアウトを図3に示します。
図3
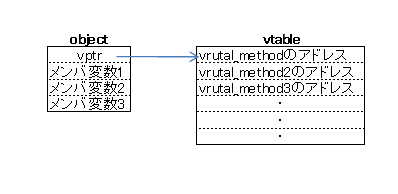
vtableと呼ばれるテーブルに呼び出すべき仮想関数の場所(アドレス)が格納されています。
また各objectはvtableの場所(アドレス)を保持する変数(ポインタ)を持っています。
さらに、機械語の特徴のとして関数呼び出し(CALL命令)は、常に同じ場所(アドレス)の関数を呼び出すだけでなく、変数(レジスタ)を通して間接的に呼び出すこともできるようになっています。
以上を踏まえて再度、擬似アセンブラコードを説明しますと、
Aでは、vtableを参照しています。EAXとはレジスタというCPUが持っている変数になりますがそこへvtableのアドレス(vptr)を代入しています。[] というのはアセンブラでのポインタ参照(間接演算子 *)になります。
Bでは、virtual_methodの呼び出すべきアドレスを、EDXに代入します。このvirtual_method_offsetですが配列のインデックスのようなもので、図3では0ということになります。
最後のCのCALL命令が、A,Bを通して取得した呼び出すべき仮想関数の呼び出しを行っていることになります。
このように擬似アセンブラコードを通してみますと、説明は難しいですが、たったの2命令の追加で仮想関数呼び出しを実現しており、C++での仮想関数呼び出しというのはかなり効率的であることが分かります。
もともと、私はアセンブラが大好き(ハードウェアを直接制御できるので)だったのですが、時代に押されてC言語を使うようになりましたが、その理由の一つとしてC言語が高級アセンブラとして設計された(つまりこのように簡単にアセンブラに置き換えられる)から動作がよく理解しやすい面があったからで、その設計思想はC++にも引き継がれていることが分かります。
続いては、公開1周年記念特集記事として『プログラミング言語の制御構造のいろいろ(3)』を書いてみます。
2011-08-04 | コメント:0件
[ADP開発日誌-公開1周年記念特集 Part3] プログラミング言語の制御構造のいろいろ(1)
ADPの1周年記念特集のPart3です。『プログラミング言語の制御構造のいろいろ』ということで数回にわたって記事をアップします。ちなみに本日でちょうどADPの初回リリースから1年になります。「なぜ、制御構造?」と思われるかもしれませんが、それはADP(Prolog)が持っている制御構造(バックトラック)が独特のものということと、JavaScriptやRubyにありますクロージャが本格的に普及してきて私自身が持っている制御構造に対する考え方(というか感覚)を変える必要があるので記事にしてみます。
制御構造とは
制御構造とはプログラムの流れ、広くはその命令(for文とかif文)を指します。制御構造を有名なものにしたのは、かのダイクストラ氏が提唱した構造化プログラミングがあります。今となっては『構造化プログラミング』という言葉を始めて聞いた人もいらっしゃるかと思いますが、『構造化プログラミング』が提唱された後に、今ではおなじみの制御構造文・選択(if)
・反復(for,while等のループ)
が明確になりました。それまでの言語ではif文やfor文もありましたが充分でなく、本格的なプログラムの記述にはgoto文を使う必要がありました。そのれに加えてgoto文では様々なプログラムの流れを作ることが出来、流れの追いにくいいわゆるスパゲティプログラムというものもありました。私が駆け出しの頃(20年程前)にはよく可読性の悪いプログラムに対して『このスパゲティプログラムが~』という表現を聞いていました。
機械語ではどうしているのか?
なぜ、「機械語の話が出てくるのか?」と思われるかもしれませんが、制御構造の発展の歴史のルーツを探ることと、コンパイラ言語では制御構造が機械語に変換されるのでその仕組みを探るという意味で、続いて機械語の話をします。機械語では初期のプログラミング言語のように比較文(if文)とgoto文のみで制御を行います。今となっては逆に難しいかもしれませんが、for文やwhile文がなくてもif文とgoto文の組み合わせでループを記述することが出来ます。
意外に思われるかもしれませんが、もう一つの制御構造文である関数呼び出し(サブルーチン呼び出し)も機械語にCALL命令という形で存在します。初期のCPUにはCALL命令がないものもあったらしいですが、今われわれが主に使っているパソコンのx86と呼ばれるCPUにもCALL命令があります。さらにx86の先祖をたどりますと、8080というパソコン用の8ビットCPUがありますが、そのCPUにもCALL命令があります(それから先は8008、4004とたどれますがこれらにCALL命令があるかどうかは不明です・・・)。
もちろんCALL命令が関数呼び出しとイコールではありません。CALL命令と関数呼び出しの違いは引数の受け渡しになります。CALL命令には引数の概念がありません。引数の受け渡しはレジスタまたはスタックまたはグローバル変数ということになります。C言語の関数呼び出しが機械語に翻訳されるるとCALL命令に翻訳されますが、その引数はスタックで渡されます。
続いては、公開1周年記念特集記事として『プログラミング言語の制御構造のいろいろ(2)』を書いてみます。
2011-07-30 | コメント:0件
[ADP開発日誌-公開1周年記念特集 Part2] ADPの次の1年の目標
ADPの1周年記念特集のPart2です。プロジェクトを公開して1年が経ち少しは慣れてきましたので、次の1年間の目標でも立ててみます。Ver 0.9 ベータ版のリリース
現在は開発版(アルファ版)ということでリリースを重ねていますが、次の1年ではベータ版のリリースにまで行えればよいかと思っております。まぁ、ゆる~い目標かもしれませんが、プロジェクト開始当初はゴールがみえていませんでしたので見えただけでもよろしいかと思います。
もっとも実装する機能が機能だけにかなりの大改造になるかと思いますので、実はゆるくはないかもしれません。
いずれにしても次の1年は開発に専念したいと思ってます。
Ver1.0に向けての機能の実装
ADPのロードマップには以下のようにVer1.0に向けての機能を掲げています。・マルチスレッド(マルチコア)対応
・ADPサーバー
・C言語インタフェース
・リソースの開放機能
ベータ版では機能的にはVer1.0相当の機能を実装します。つまり上記の機能は次の1年で実装しようとしています。
このうちマルチスレッド(マルチコア)対応が一つの山場でして、現在マルチスレッドの機能の一部を実装しています。
ADPではマルチスレッドに関する4つの機能を実装する予定です。2つはProlog由来の述語評価に関する並列処理(AND並列/OR並列)で、残りの2つがオリジナルということになりますが、そのうちの1つは目下開発作業をしているパイプライン処理になります(LL PlanetsのLTで発表するネタの一つです)。もう一つは組み込み述語・C言語インタフェースに関わる部分になります。
次の山場がリソースの開放機能(コンテクスト)になります。現在DBのコネクションの管理やファイルのクローズ管理ですが曖昧に実装しています。この辺りについてもう少し洗練された機能を追加しようと考えております。この機能ですがイメージだけで具体的な実装方法や文法も明確ではないので、かなりの検討・試行錯誤が入るのでそれはそれで難産が予想されます。
次のADPサーバーやC言語インタフェースは、技術的には難しいものではないのですが、マルチスレッド機能やリソースの開放機能が実装されないとこの辺りの機能が実装できないので後回しとなっています。
マニュアル
英語版マニュアルが欲しいところです。もっともこちらは協力者を募ってやろうかと思っています。ただ、このような小プロジェクトに協力者は来てもらえそうにないので英語の勉強がてら自分で書いてみようかとも思っています。英語版のマニュアルの必要性に関してですが、私もこの業界が長いので良く分かっているのですが、日本でプログラミング言語を流行らそうと思ったら、先ずは海外で流行らす必要があります。日本人は自国の技術より海外(主に欧米)からの技術を取り入れようとする傾向があります。実は私もそういう傾向があったりしますので、『日本人は~』と自国の否定をする気はさらさらありませんが、まぁこの特性は頭に入れないと痛い目にあうかと思います。
IT業界に関していうと日本が流行の最先端にならない(なれない)理由の1つにこのマインドの弱さにあるかと思います。例えば今でしたら、AndoroidやiPad,iPhoneが流行っていますが、これらはどちらも海外からのものです。一方で日本の携帯は良く出来ていると思いますが、それを『ガラケー』と言って切り捨ててしまうところもどうかと思いますし、なぜ海外ではやらせないのか? 流行らなかったのか? とも思わなくもないのですが、まぁ浮かばれないのは一生懸命開発した技術者でしょうか。
技術者自体は優秀な人がそろっているのになぜトヨタみたいな世界に通用する企業(技術を発信できる企業)が出ないのか改めて考えると不思議に思います。
話が脱線しましたが、日本語版のマニュアルの完成と共に英語版に着手できればと思います。
その他
最初の1年は広報活動も色々しましたが、少し状況が分かりましたので、次の1年は開発に専念し特に広報活動はやめようかと思っています。もっとも今まで出来たつながりはそのまま維持していこうとも思っております。続いては、公開1周年記念特集記事として『プログラミング言語の制御構造のいろいろ(1)』を書いてみます。
2011-07-29 | コメント:0件
Previous Page | Next Page